No products in the cart.



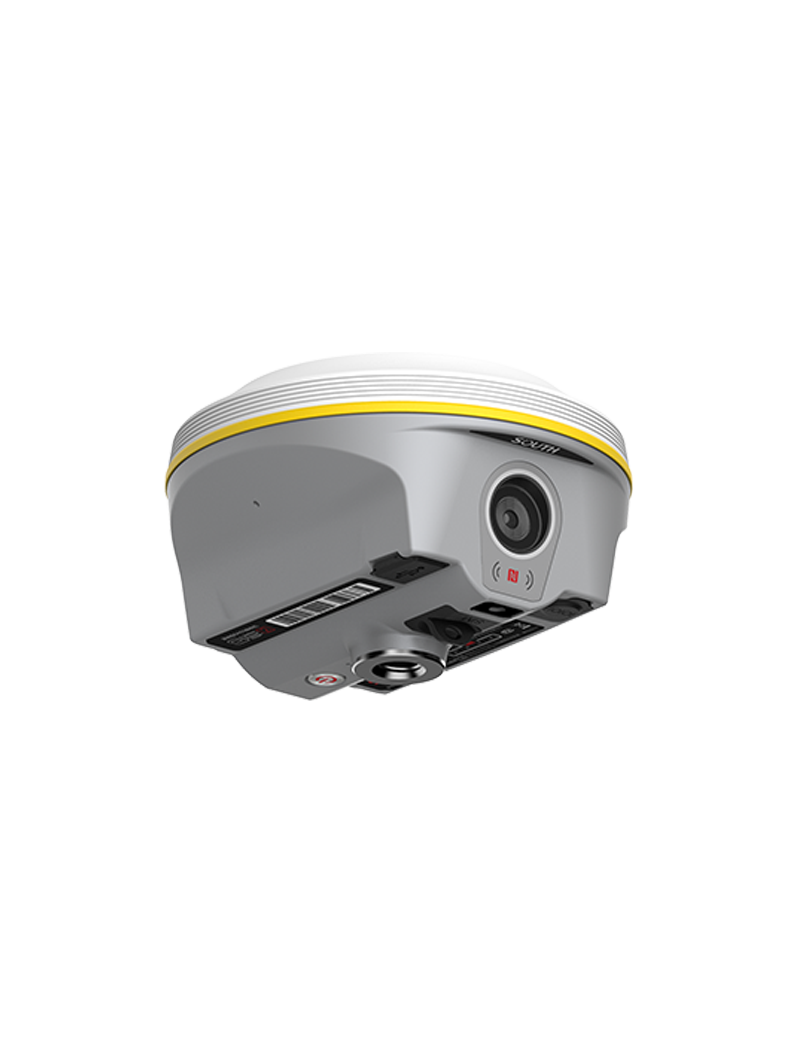
GNSS IMU Especial para Fotogrametria
Posicionamiento visual y replanteo
Hasta 1760 canales
Modelado 3D
Farlink 2.0
3 formas de procesamiento
IMU de cuarta generación
----
More Efficient than Traditional RTK
√ SOUTH Group has accumulated a decade of experience in the development of UAV photogrammetry solutions. This has led to the creation of a unique and efficient photogrammetry algorithm for INNO8. This allows INNO8 to directly collect both image and coordinate data. Users can capture still photos or shoot videos while walking. With just one group of photos or a video, users can obtain coordinates for all target points within the measurable range, measuring hundreds of points in few minutes.
√ Compared to traditional photogrammetry equipment, INNO8’s data acquisition speed is faster. After collecting photos or videos, users can perform real-time automatic processing by using data collection App on controller. This allows users to obtain coordinates without the need for PC post-processing software, especially in time-sensitive situations.
√ Compared to traditional RTK, INNO8 has a broader working range and fewer blind spots. By photogrammetry function, surveyors can remotely measure points that are without GNSS signal or poor signal quality, from a well-signaled position. Points without satellite signals, such as spaces under rooftops, can now be measured. Previously challenging blind spots or places with severe multipath effects like dense tree areas or construction sites with multiple obstacles, are now easier to measure.
More User-friendly than Traditional RTK
√ When surveyors process photos in the controller App, they simply need to click on the same point in just three photos to calculate the coordinates. This operation is quite easy to learn.
√ A notable feature of photogrammetry is labor-saving. When using INNO8, surveyors can achieve remote measurements at distances of up to 10 meters or even more (in ideal condition), eliminating the need to physically approach each measurement point. This working method significantly saves the surveyor's physical effort, reducing the labor involved in fieldwork.
√ In cases some data needs to be remeasured, surveyors do not have to return to the field. They can simply click on the saved photos to obtain coordinates, making re-measurement a hassle-free process.

